Problem Statement
In this post, I will follow the Vehicle Routing Problem (VRP) with a focus on the capacitated vehicle routing problem (CVRP) and utilizing an alternative Mixed Integer Programming (MIP) approach.
Routing Model
The main section of the program creates the index manager and the routing model.
// Create Routing Index Manager
RoutingIndexManager manager = new RoutingIndexManager(data.distanceMatrix.length, data.vehicleNumber, data.depot);
// Create Routing Model
RoutingModel routing = new RoutingModel(manager);
Distance Callback
The code snippet initializes the transit callback to compute distances between nodes and sets up the arc costs for all vehicles in the VRP model to ensure that the solver considers the correct distances when optimizing the routes:
// Create and register a transit callback
final int transitCallbackIndex =
routing.registerTransitCallback((long fromIndex, long toIndex) -> {
// Convert from routing variable Index to user NodeIndex.
int fromNode = manager.indexToNode(fromIndex);
int toNode = manager.indexToNode(toIndex);
return (long) data.distanceMatrix[fromNode][toNode];
});
// Define cost of each arc.
routing.setArcCostEvaluatorOfAllVehicles(transitCallbackIndex);
Demand Callback and Capacity Constraints
The solver requires a demand callback, which returns the demand at each location, and a dimension for the vehicle capacity constraints:
// Add Capacity constraint.
final int demandCallbackIndex = routing.registerUnaryTransitCallback((long fromIndex) -> {
// Convert from routing variable Index to user NodeIndex.
int fromNode = manager.indexToNode(fromIndex);
return data.demands[fromNode];
});
routing.addDimensionWithVehicleCapacity(demandCallbackIndex, 0, // null capacity slack
data.vehicleCapacities, // vehicle maximum capacities
true, // start cumul to zero
"Capacity");
Changing the search strategy
Since the routing solver does not always return the optimal solution, we can use a more advanced search strategy called guided local search, which enables escaping a local minimum. We can further tune our use case with other Routing Options.
// Setting first solution heuristic.
RoutingSearchParameters searchParameters =
main.defaultRoutingSearchParameters()
.toBuilder()
.setFirstSolutionStrategy(FirstSolutionStrategy.Value.PATH_CHEAPEST_ARC)
.setLocalSearchMetaheuristic(LocalSearchMetaheuristic.Value.GUIDED_LOCAL_SEARCH)
.setTimeLimit(Duration.newBuilder().setSeconds(60).build())
.build();
Data Model
This is the data model:
@Data
@Builder
@AllArgsConstructor
@NoArgsConstructor
@Serdeable.Serializable
@Serdeable.Deserializable
public class DataModel {
double[][] distanceMatrix;
long[] demands;
long[] vehicleCapacities;
int vehicleNumber;
int depot;
}
The CVRP Service
This is the Micronaut service for CVRP, with the printSolution method adapted from OR-Tools:
@Singleton
public class CVRPService {
static {
Loader.loadNativeLibraries();
}
CVRPSolution solve(DataModel data) {
// Create Routing Index Manager
RoutingIndexManager manager = new RoutingIndexManager(data.distanceMatrix.length, data.vehicleNumber, data.depot);
// Create Routing Model
RoutingModel routing = new RoutingModel(manager);
// Create and register a transit callback
final int transitCallbackIndex =
routing.registerTransitCallback((long fromIndex, long toIndex) -> {
// Convert from routing variable Index to user NodeIndex.
int fromNode = manager.indexToNode(fromIndex);
int toNode = manager.indexToNode(toIndex);
return (long) data.distanceMatrix[fromNode][toNode];
});
// Define cost of each arc.
routing.setArcCostEvaluatorOfAllVehicles(transitCallbackIndex);
// Add Capacity constraint.
final int demandCallbackIndex = routing.registerUnaryTransitCallback((long fromIndex) -> {
// Convert from routing variable Index to user NodeIndex.
int fromNode = manager.indexToNode(fromIndex);
return data.demands[fromNode];
});
routing.addDimensionWithVehicleCapacity(demandCallbackIndex, 0, // null capacity slack
data.vehicleCapacities, // vehicle maximum capacities
true, // start cumul to zero
"Capacity");
// Setting first solution heuristic.
RoutingSearchParameters searchParameters =
main.defaultRoutingSearchParameters()
.toBuilder()
.setFirstSolutionStrategy(FirstSolutionStrategy.Value.PATH_CHEAPEST_ARC)
.setLocalSearchMetaheuristic(LocalSearchMetaheuristic.Value.GUIDED_LOCAL_SEARCH)
.setTimeLimit(Duration.newBuilder().setSeconds(60).build())
.build();
// Solve the problem.
Assignment solution = routing.solveWithParameters(searchParameters);
Map<Integer, String> vehicleMap = new HashMap<>();
for (int i = 0; i < data.vehicleNumber; ++i) {
long index = routing.start(i);
long routeLoad = 0;
String route = "";
while (!routing.isEnd(index)) {
long nodeIndex = manager.indexToNode(index);
routeLoad += data.demands[(int) nodeIndex];
route += nodeIndex + " Load(" + routeLoad + ") -> ";
long previousIndex = index;
index = solution.value(routing.nextVar(index));
}
route += manager.indexToNode(routing.end(i));
vehicleMap.put(i, route);
}
return CVRPSolution.builder().objectiveValue(solution.objectiveValue()).variableValue(vehicleMap).build();
}
}
The CVRP Controller
Here is the Micronaut controller for the CVRP:
@Controller("/cvrp")
public class CVRPController {
private final CVRPService cvrpService;
public CVRPController(CVRPService cvrpService) {
this.cvrpService = cvrpService;
}
@Post("/solve")
@Produces(MediaType.APPLICATION_JSON)
@Consumes(MediaType.APPLICATION_JSON)
public CVRPSolution solve(@Body DataModel dataModel) {
return cvrpService.solve(dataModel);
}
}
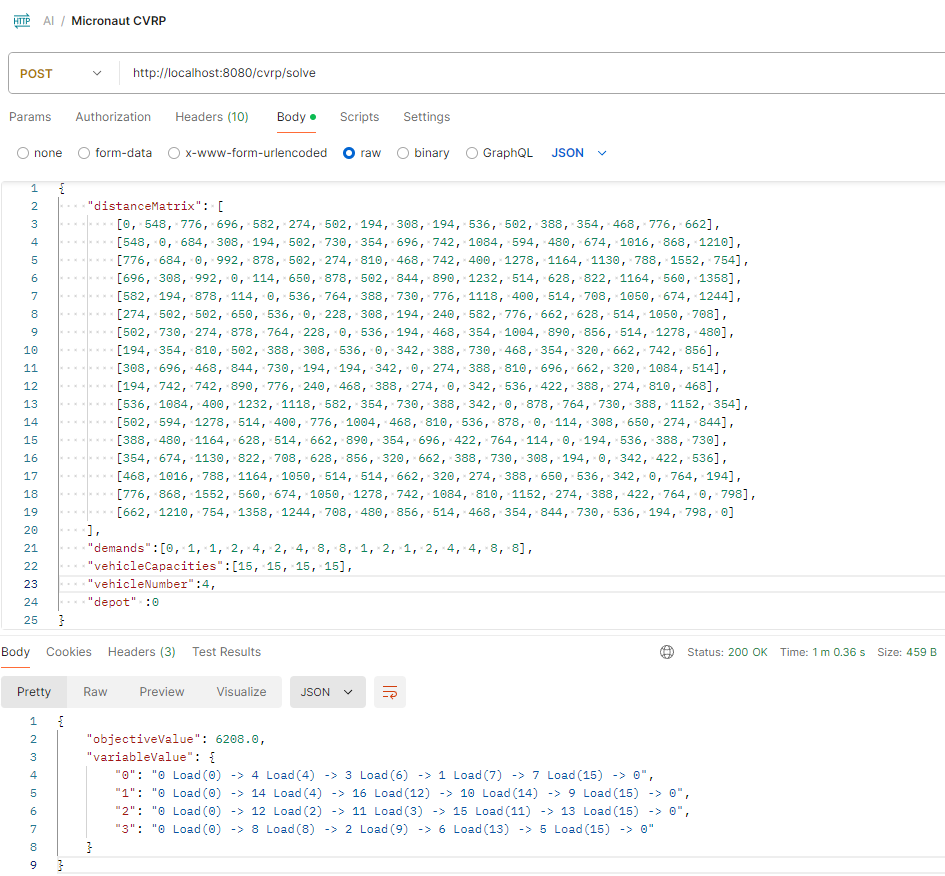
The Input
This is the sample input from the OR-Tools:
{
"distanceMatrix": [
[0, 548, 776, 696, 582, 274, 502, 194, 308, 194, 536, 502, 388, 354, 468, 776, 662],
[548, 0, 684, 308, 194, 502, 730, 354, 696, 742, 1084, 594, 480, 674, 1016, 868, 1210],
[776, 684, 0, 992, 878, 502, 274, 810, 468, 742, 400, 1278, 1164, 1130, 788, 1552, 754],
[696, 308, 992, 0, 114, 650, 878, 502, 844, 890, 1232, 514, 628, 822, 1164, 560, 1358],
[582, 194, 878, 114, 0, 536, 764, 388, 730, 776, 1118, 400, 514, 708, 1050, 674, 1244],
[274, 502, 502, 650, 536, 0, 228, 308, 194, 240, 582, 776, 662, 628, 514, 1050, 708],
[502, 730, 274, 878, 764, 228, 0, 536, 194, 468, 354, 1004, 890, 856, 514, 1278, 480],
[194, 354, 810, 502, 388, 308, 536, 0, 342, 388, 730, 468, 354, 320, 662, 742, 856],
[308, 696, 468, 844, 730, 194, 194, 342, 0, 274, 388, 810, 696, 662, 320, 1084, 514],
[194, 742, 742, 890, 776, 240, 468, 388, 274, 0, 342, 536, 422, 388, 274, 810, 468],
[536, 1084, 400, 1232, 1118, 582, 354, 730, 388, 342, 0, 878, 764, 730, 388, 1152, 354],
[502, 594, 1278, 514, 400, 776, 1004, 468, 810, 536, 878, 0, 114, 308, 650, 274, 844],
[388, 480, 1164, 628, 514, 662, 890, 354, 696, 422, 764, 114, 0, 194, 536, 388, 730],
[354, 674, 1130, 822, 708, 628, 856, 320, 662, 388, 730, 308, 194, 0, 342, 422, 536],
[468, 1016, 788, 1164, 1050, 514, 514, 662, 320, 274, 388, 650, 536, 342, 0, 764, 194],
[776, 868, 1552, 560, 674, 1050, 1278, 742, 1084, 810, 1152, 274, 388, 422, 764, 0, 798],
[662, 1210, 754, 1358, 1244, 708, 480, 856, 514, 468, 354, 844, 730, 536, 194, 798, 0]
],
"demands":[0, 1, 1, 2, 4, 2, 4, 8, 8, 1, 2, 1, 2, 4, 4, 8, 8],
"vehicleCapacities":[15, 15, 15, 15],
"vehicleNumber":4,
"depot" :0
}
The CVRPSolution
This is the CVRPSolution:
@Data
@Builder
@AllArgsConstructor
@NoArgsConstructor
@Serdeable.Serializable
public class CVRPSolution {
private double objectiveValue;
private Map<Integer, String> variableValue;
}
Solver in Action
Optional: Solving using MIP Approach
Let’s create a solveMIP method in CVRPService.java:
// Create the MIP solver
MPSolver solver = new MPSolver("CVRP", MPSolver.OptimizationProblemType.CBC_MIXED_INTEGER_PROGRAMMING);
Variables
Let \( t \) be the decision variable for denoting that vehicle \( k \) will travel from node \( i \) to node \( j \). Let \( s \) be the decision variable for denoting that node \( i \) is fulfilled by vehicle \( k \).
// Variables: t[i][j][k] is 1 if vehicle k travels from node i to node j
MPVariable[][][] t = new MPVariable[numNodes][numNodes][numVehicles];
for (int i = 0; i < numNodes; i++) {
for (int j = 0; j < numNodes; j++) {
if (i != j) {
for (int k = 0; k < numVehicles; k++) {
t[i][j][k] = solver.makeIntVar(0, 1, "travel_" + i + "_" + j + "_" + k);
}
}
}
}
// Variables: s[i][k] is 1 if node i is fulfilled by k
MPVariable[][] s = new MPVariable[numNodes][numVehicles];
for (int i = 0; i < numNodes; i++) {
for (int k = 0; k < numVehicles; k++) {
s[i][k] = solver.makeIntVar(0, 1, "serve_" + i + "_" + k);
}
}
Objectives
Minimize the total distance travelled by all vehicles:
$$ \sum_{k \in K} \sum_{i \in I} \sum_{j \in J} t_{i,j,k} \cdot \text{{distance matrix}}_{i,j} $$This is implemented as:
// Objective: Minimize the total distance traveled
MPObjective objective = solver.objective();
for (int k = 0; k < numVehicles; k++) {
for (int i = 0; i < numNodes; i++) {
for (int j = 0; j < numNodes; j++) {
if (i != j) {
objective.setCoefficient(t[i][j][k], data.distanceMatrix[i][j]);
}
}
}
}
objective.setMinimization();
Constraints
- Each vehicle starts at the depot:
- Each vehicle ends at the depot:
This is implemented as:
// 1. Each vehicle starts at the depot
for (int k = 0; k < numVehicles; k++) {
MPConstraint constraint = solver.makeConstraint(1, 1, "depot_start_" + k);
for (int j = 1; j < numNodes; j++) {
constraint.setCoefficient(t[depot][j][k], 1);
}
}
// 2. Each vehicle ends at the depot
for (int k = 0; k < numVehicles; k++) {
MPConstraint constraint = solver.makeConstraint(1, 1, "deport_end_" + k);
for (int i = 1; i < numNodes; i++) {
constraint.setCoefficient(t[i][depot][k], 1);
}
}
- Each Node Is Visited Exactly Once by Exactly One Vehicle (Excluding Depot):
This is implemented as:
// 3. Each node is visited exactly once by exactly one vehicle (excluding depot)
for (int j = 1; j < numNodes; j++) {
MPConstraint constraint = solver.makeConstraint(1, 1, "visit_node_" + j);
for (int i = 0; i < numNodes; i++) {
if (i != j) {
for (int k = 0; k < numVehicles; k++) {
constraint.setCoefficient(t[i][j][k], 1);
}
}
}
}
- Flow Conservation: If a vehicle arrives at a node, it must leave:
This is implemented as:
// 4. Flow conservation: if a vehicle arrives at a node, it must leave
for (int k = 0; k < numVehicles; k++) {
for (int n = 0; n < numNodes; n++) { // Include depot to enforce return
MPConstraint constraint = solver.makeConstraint(0, 0, "flow_conservation_" + n + "_" + k);
for (int i = 0; i < numNodes; i++) {
if (i != n) {
constraint.setCoefficient(t[i][n][k], 1);
}
}
for (int j = 0; j < numNodes; j++) {
if (n != j) {
constraint.setCoefficient(t[n][j][k], -1);
}
}
}
}
- Capacity constraints: For each vehicle $k $, ensure that the total demand on its route does not exceed its capacity:
This is implemented as:
// 5. Capacity constraints
for (int k = 0; k < numVehicles; k++) {
MPConstraint constraint = solver.makeConstraint(0, data.vehicleCapacities[k], "capacity_" + k);
for (int i = 1; i < numNodes; i++) {
for (int j = 1; j < numNodes; j++) {
if (i != j) {
constraint.setCoefficient(t[i][j][k], data.demands[i]);
}
}
}
}
- Subtour elimination constraints: To ensure that there are no subtours (sub-routes) in the solution, we introduce auxiliary variables \( 𝑢 \) for each customer node \( i \). These variables help enforce the sequence in which nodes are visited, preventing isolated cycles that do not include the depot. Ths subtour elimination constraint is given by:
This is implemented as:
// Create auxiliary variables for subtour elimination
MPVariable[] u = new MPVariable[numNodes];
for (int i = 1; i < numNodes; i++) {
u[i] = solver.makeIntVar(0, numNodes, "u_" + i);
}
// 6. Subtour elimination constraints
for (int k = 0; k < numVehicles; k++) {
for (int i = 1; i < numNodes; i++) {
for (int j = 1; j < numNodes; j++) {
if (i != j) {
MPConstraint subtourConstraint = solver.makeConstraint(-MPSolver.infinity(), numNodes - 1, "subtour_elimination_" + i + "_" + j + "_" + k);
subtourConstraint.setCoefficient(u[i], 1);
subtourConstraint.setCoefficient(u[j], -1);
subtourConstraint.setCoefficient(t[i][j][k], numNodes);
}
}
}
}
Putting it together
This is the sovleMIP method in CVRPService.java:
CVRPSolution solveMIP(DataModel data) {
final int numNodes = data.distanceMatrix.length;
final int numVehicles = data.vehicleNumber;
final int depot = data.depot;
// Create the MIP solver
MPSolver solver = new MPSolver("CVRP", MPSolver.OptimizationProblemType.CBC_MIXED_INTEGER_PROGRAMMING);
// Variables: t[i][j][k] is 1 if vehicle k travels from node i to node j
MPVariable[][][] t = new MPVariable[numNodes][numNodes][numVehicles];
for (int i = 0; i < numNodes; i++) {
for (int j = 0; j < numNodes; j++) {
if (i != j) {
for (int k = 0; k < numVehicles; k++) {
t[i][j][k] = solver.makeIntVar(0, 1, "travel_" + i + "_" + j + "_" + k);
}
}
}
}
// Variables: s[i][k] is 1 if node i is served by k
MPVariable[][] s = new MPVariable[numNodes][numVehicles];
for (int i = 0; i < numNodes; i++) {
for (int k = 0; k < numVehicles; k++) {
s[i][k] = solver.makeIntVar(0, 1, "serve_" + i + "_" + k);
}
}
// Objective: Minimize the total distance traveled
MPObjective objective = solver.objective();
for (int k = 0; k < numVehicles; k++) {
for (int i = 0; i < numNodes; i++) {
for (int j = 0; j < numNodes; j++) {
if (i != j) {
objective.setCoefficient(t[i][j][k], data.distanceMatrix[i][j]);
}
}
}
}
objective.setMinimization();
// Constraints:
// 1. Each vehicle starts at the depot
for (int k = 0; k < numVehicles; k++) {
MPConstraint constraint = solver.makeConstraint(1, 1, "depot_start_" + k);
for (int j = 1; j < numNodes; j++) {
constraint.setCoefficient(t[depot][j][k], 1);
}
}
// 2. Each vehicle ends at the depot
for (int k = 0; k < numVehicles; k++) {
MPConstraint constraint = solver.makeConstraint(1, 1, "deport_end_" + k);
for (int i = 1; i < numNodes; i++) {
constraint.setCoefficient(t[i][depot][k], 1);
}
}
// 3. Each node is visited exactly once by exactly one vehicle (excluding depot)
for (int j = 1; j < numNodes; j++) {
MPConstraint constraint = solver.makeConstraint(1, 1, "visit_node_" + j);
for (int i = 0; i < numNodes; i++) {
if (i != j) {
for (int k = 0; k < numVehicles; k++) {
constraint.setCoefficient(t[i][j][k], 1);
}
}
}
}
// 4. Flow conservation: if a vehicle arrives at a node, it must leave
for (int k = 0; k < numVehicles; k++) {
for (int n = 0; n < numNodes; n++) { // Include depot to enforce return
MPConstraint constraint = solver.makeConstraint(0, 0, "flow_conservation_" + n + "_" + k);
for (int i = 0; i < numNodes; i++) {
if (i != n) {
constraint.setCoefficient(t[i][n][k], 1);
}
}
for (int j = 0; j < numNodes; j++) {
if (n != j) {
constraint.setCoefficient(t[n][j][k], -1);
}
}
}
}
// 5. Capacity constraints
for (int k = 0; k < numVehicles; k++) {
MPConstraint constraint = solver.makeConstraint(0, data.vehicleCapacities[k], "capacity_" + k);
for (int i = 1; i < numNodes; i++) {
for (int j = 1; j < numNodes; j++) {
if (i != j) {
constraint.setCoefficient(t[i][j][k], data.demands[i]);
}
}
}
}
// Create auxiliary variables for subtour elimination
MPVariable[] u = new MPVariable[numNodes];
for (int i = 1; i < numNodes; i++) {
u[i] = solver.makeIntVar(0, numNodes, "u_" + i);
}
// 6. Subtour elimination constraints
for (int k = 0; k < numVehicles; k++) {
for (int i = 1; i < numNodes; i++) {
for (int j = 1; j < numNodes; j++) {
if (i != j) {
MPConstraint subtourConstraint = solver.makeConstraint(-MPSolver.infinity(), numNodes - 1, "subtour_elimination_" + i + "_" + j + "_" + k);
subtourConstraint.setCoefficient(u[i], 1);
subtourConstraint.setCoefficient(u[j], -1);
subtourConstraint.setCoefficient(t[i][j][k], numNodes);
}
}
}
}
// Solve
solver.setTimeLimit(10000);
MPSolver.ResultStatus resultStatus = solver.solve();
// Check the result
Map<Integer, String> vehicleMap = new HashMap<>();
if (resultStatus == MPSolver.ResultStatus.OPTIMAL || resultStatus == MPSolver.ResultStatus.FEASIBLE) {
for (int k = 0; k < numVehicles; k++) {
int currentNode = depot;
String route = String.valueOf(depot); // Start from the depot
while (true) {
boolean routeContinues = false;
for (int j = 0; j < numNodes; j++) {
if (currentNode != j && t[currentNode][j][k].solutionValue() == 1.0) {
route += " -> " + j;
currentNode = j;
routeContinues = true;
break;
}
}
if (!routeContinues || currentNode == depot) {
break; // No further route found for this vehicle
}
}
vehicleMap.put(k, route);
}
}
return CVRPSolution.builder().objectiveValue(objective.value()).variableValue(vehicleMap).build();
}
The updated controller
This is the refactored CVRPController.java:
@Post("/solveMIP")
@Produces(MediaType.APPLICATION_JSON)
@Consumes(MediaType.APPLICATION_JSON)
public CVRPSolution solveMIP(@Body DataModel dataModel) {
return cvrpService.solveMIP(dataModel);
}
MIP Solver in Action
This is the result for the sample data:
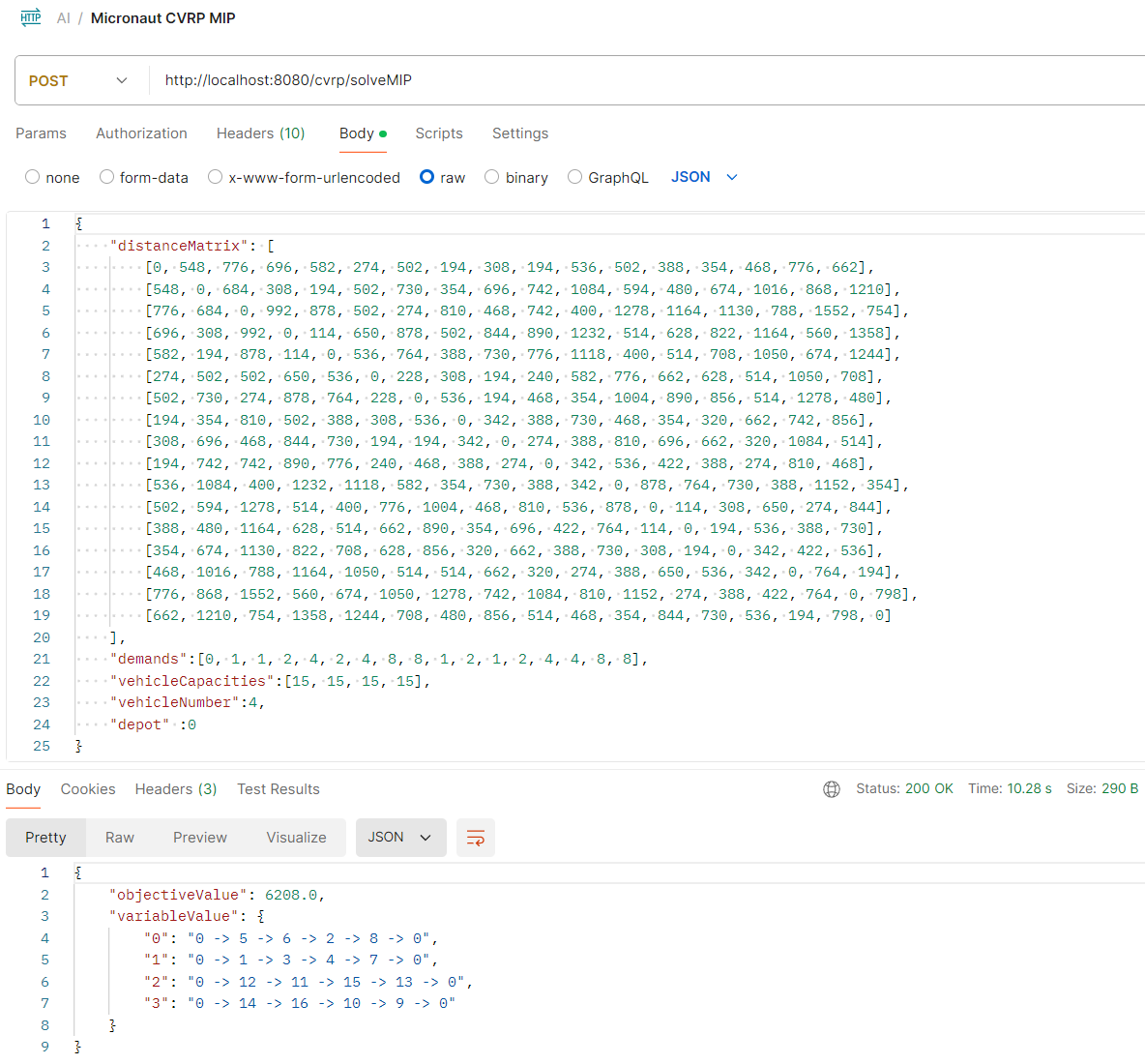
The MIP approach provides a precise method for solving the Capacitated Vehicle Routing Problem, offering optimal solutions but with higher computational demands. This makes it less suitable for very large instances or real-time applications compared to heuristic methods. While MIP handles complex constraints more flexibly, traditional routing models are faster and more scalable. Therefore, the choice between MIP and traditional methods depends on the problem’s requirements, such as accuracy, size, and available computational resources. MIP remains a powerful tool for tackling challenging optimization problems in logistics and transportation.