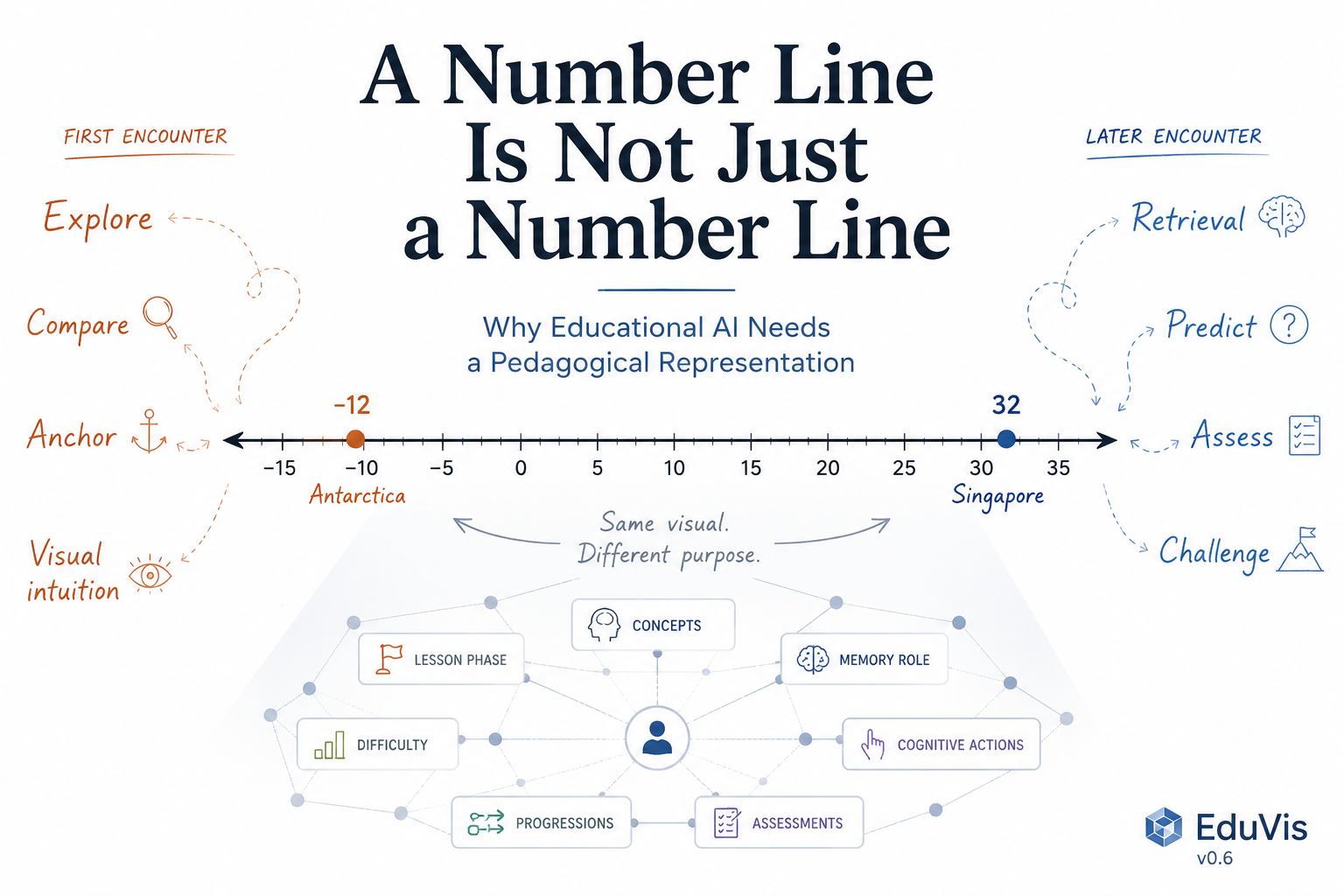
A Number Line Is Not Just a Number Line
AI can generate explanations, worksheets, and diagrams, but it still lacks a way to represent why a learning activity exists. This article explores the missing pedagogical representation layer in educational AI and how EduVis separates instructional intent from presentation to build more adaptive, curriculum-aware learning experiences.
Read more